Converting Diagonal Field of View (FOV) to Horizontal FOV


What is a Camera's Field of View (FOV)?
A camera's field of view (FOV) is the extent of the scene visible through the camera lens. It is measured as an angle (in degrees) and can be described in three ways:
- Diagonal FOV: The angle measured from one corner of the image to the opposite corner (most often used by manufacturers).
- Horizontal FOV: The width of the scene visible from left to right.
- Vertial FOV: The height of the scene visible from top to bottom.
Because cameras capture rectangular images, the horizontal FOV is always smaller than the diagonal FOV.
What Determines Field of View?
The FOV depends on two factors:
- Focal length of the lens: (how "zoomed in" the camera is)
- Short focal length (wide-angle lens) = wider FOV
- Long focal length (telophoto lens) = narrower FOV
- Sensor size (the physical size of the camer's imageing sensor)
- Larger sensor = captures wider angle
- Smaller sensor = narrower view
- The relationship can be expressed mathematicaly as: tan(hFOV/2) = 0.5*sensor_width/focal_length, where hFOV is the horizontal FOV
Why Field of View Matters (for drones)
For drone pilots, the FOV determines how much ground area is visible in each photo or video frame. It directly affects:
- Framing and composition for photography and videography
- Mapping accuracy (when calculating Ground Sample Distance, or GSD)
- Coverage area per flight path in waypoint missions
- Overlap settings when planning photogrammetry missions
Example:
A DJI Mini 4 Pro has a diagonal FOV of 82.1°, meaning it captures a fairly wide scene suitable for mapping or inspection.
Converting From Diagonal to Horizontal or Vertical FOV
DJI, like most camera manufacturers, specifies the Field of View (FOV) of its lenses using the diagonal angle. This value corresponds to a 4:3 (or occasionally 3:2) aspect ratio, which is the format typically used for still photos. However, it is often useful to know the horizontal and/or vertical FOV instead of the diagonal.

Can the Pythagorean Theorem be used to Compute the Horizontal FOV?
A tempting, but incorrect approach, is to use the Pythagorean Theorem to determine the ratio between the horizontal and diagonal aspects, and then multiply the diagonal FOV by that ratio to estimate the horizontal FOV. This simplified method, illustrated in the figure to the right, produces incorrect results.
The issue with this approach lies in the fact that FOV angles do not scale linearly when projected onto a flat surface. The relationship between the FOV angle and the corresponding distance on the projection plane is inherently non-linear. For instance, a one-degree increase in FOV at a narrow angle results in only a slight change in the projected width, whereas the same one-degree increase at a wide FOV (close to 180°) leads to a significantly larger change

Understanding FOV Relationships and Conversions
As illustrated in the figure on the right, the tangent of half the FOV angle is equal to half of the image dimension (whether width, height, or diagonal) divided by the adjacent side of the projection triangle. By applying this principle to both diagonal and horizontal dimensions, two equations can be derived and combined into a single expression that relates the FOV angles to the aspect ratio.
This expression can then be rearranged to calculate the horizontal FOV (FOVhoriz) based on the diagonal FOV (FOVdiag) and the aspect ratio parameters, as shown in the figure.
A similar method can be employed to convert the diagonal FOV of a 4:3 (or 3:2) photo format to the equivalent diagonal FOV of a 16:9 video format. In this conversion, the horizontal FOV remains unchanged, while the vertical FOV and diagonal FOV are adjusted to align with the new aspect ratio used in video production.
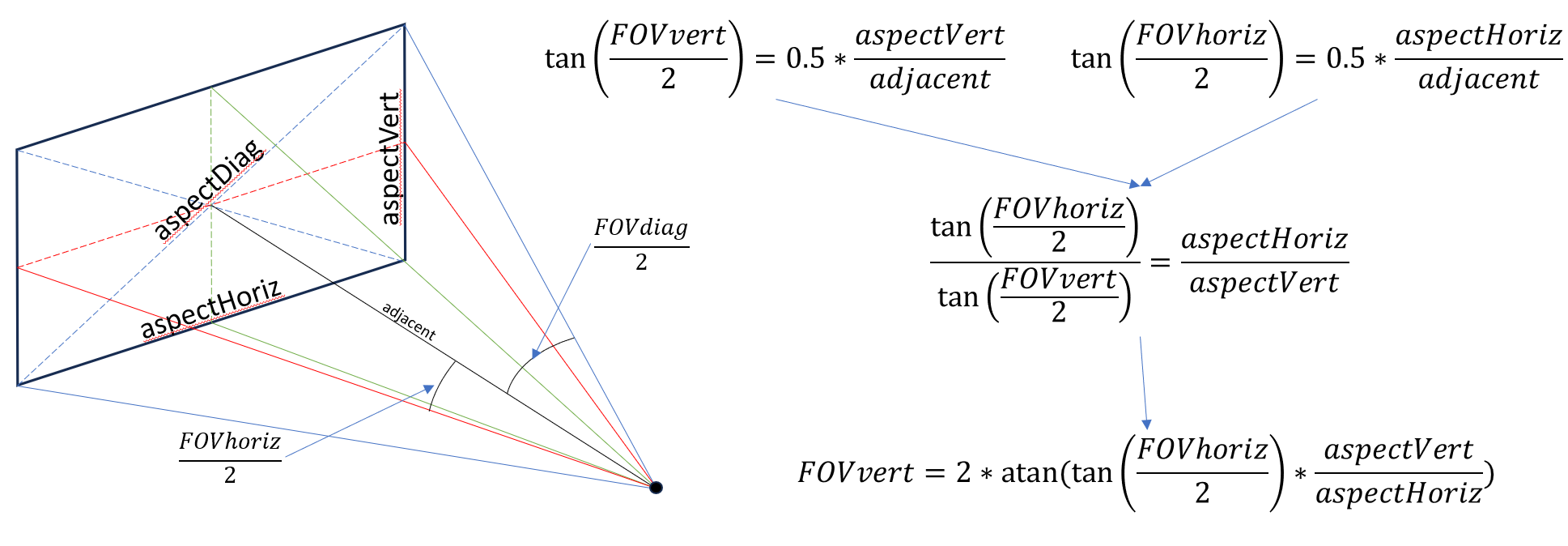
Converting Horizontal to Vertical Field of View
When the horizontal field of view (FOV) is known, it may be necessary to determine the vertical FOV for various applications, such as in photography, mapping, or many other reasons. To perform this conversion, the equations displayed earlier can be rearranged accordingly. It is important to note that the aspect ratio of the camera or image must be known for accurate calculations.
The aspect ratio represents the relationship between the width and height of the viewing area, typically expressed as width:height (e.g., 16:9). With this information, one can apply the appropriate formulas to derive the vertical FOV from the horizontal FOV.
The diagram on the right provides a visual representation of this conversion process, making it easier to understand. For added convenience, a web application that facilitates these calculations is linked below, allowing users to quickly compute the vertical FOV based on the horizontal FOV and aspect ratio.
Horizontal/Vertical FOV Calculation Tools
- Horizontal and Vertical FOV/GSD Calculator for DJI Drones
- Convert from horizontal FOV to vertical FOV or from vertical FOV to horizontal FOV
- Converting diagonal field of view and aspect ratio to horizontal and vertical field of view