360° Panorama Mission Creator v2
Instructions

Instructions
This application will convert a series of Litchi waypoints Litchi mission CSV file containing the instructions to generate 360° panoramas centered on those Litchi waypoints.
- Create one or more waypoints using Litchi's Mission Hub. At the time of this writing, the old Mission Hub must be used as the new hub does not yet provide CSV output.
- Specify an appropriate height for each of the waypoints.
- Optionally, specify the heading/direction of this waypoint. This is not really necessary but can be used to orient the initial center of the resulting panorama.
- Export these waypoints as a CSV file.
- In page one of 360 Panorama Creator:
- Select the drone type that will be used to fly the mission. Each drone has a different field of view (FOV). This value is necessary in order to determine the number of photos required.
- Litchi is able to store and execute up to 15 camera actions per waypoint. DJI Fly is not able to do the same. If it will be desired to convert this panorama mission to a DJI Fly mission, select the "Enable DJI Fly Compatibility" checkbox. This will create more waypoints, but will make the mission flyable with DJI Fly.
- Most drones support a maximum gimbal pitch angle of 20 degrees. If your drone and app support a higher gimbal pitch angle, select it here.
- Select the desired horizontal and vertical image overlaps.
- Select the CSV file from step 1 containing the panorama locations from Litchi's Mission Hub.
- Select the "Generate 360 Panorama Waypoint Mission for Litchi button.
- In page two of 360 Panorama Creator:
- Review the parameters and calculations.
- Based on the type of drone and the minimum overlaps requested, both the headings and gimbal pitch angles will be computed to capture the 360° panorama component photos. The actual overlaps (which are generally greater than the minimums requested) will be computed. Review these headings and angles.
- Download the Litchi CSV file.
- Optionally, download the kml preview file for Google Earth Pro. This will allow one to preview each of the 360° panorama component photo views in Google Earth Pro.
- In Litchi's Mission Hub:
- Use the Missions menu to import the csv file created by 360° Panorama Creator.
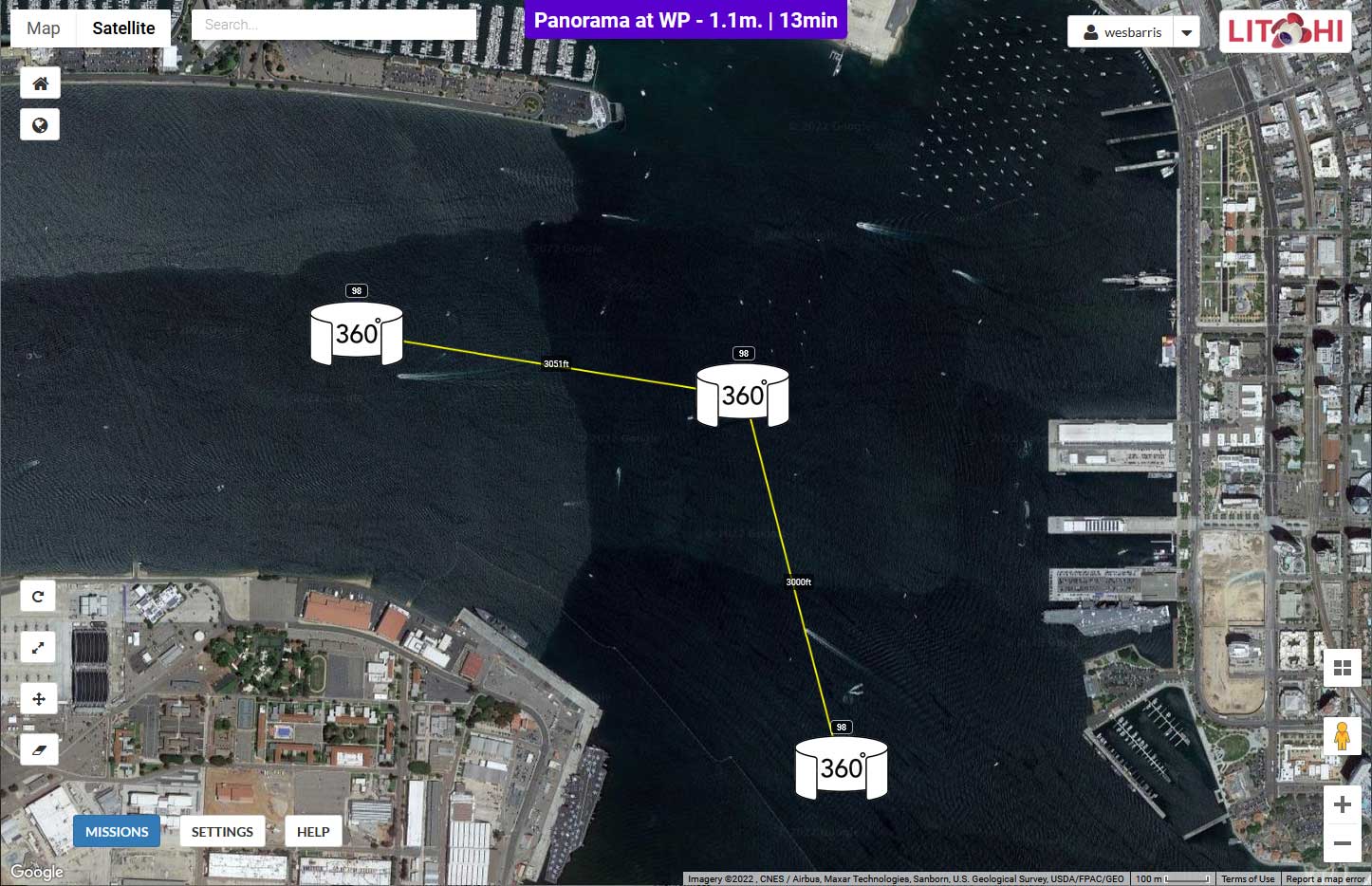
- The imported mission will have a cluster of "dummy" waypoints around each photo-capture waypoint as shown in the image below.
The component photos must be captured within the following constraints:
- A maximum of 15 camera actions can be defined at each waypoint.
- The "Tilt Camera" camera action does not accept positive pitch angles.
- Sequential waypoints must be separated by at least 0.6 meters.
- IMPORTANT: Configure the following mission parameters:
- Mission Settings: Select the correct drone model
- Mission Settings: Heading Mode: Custom (WD)
- Mission Settings: Path Mode: Straight Lines
- Mission Settings: Cruising Speed: ~10mph (16km/h)
- Litchi App Settings: Gimbal Extension (+30°): On (NOTE: This setting defaults to "Off" every time you start the Litchi app with some drones.)
- Go capture some 360° panorama photos!
- Manually stich the photos together to create a 360° panorama.
- There are many stiching programs available.
- I have used Autopano Giga with success.
This web applcation will allow one to upload a CSV file containing a simple waypoint mission (maximum of 10 waypoints). It will then generate a new Litchi mission (CSV file) with the necessary waypoints and camera actions to capture photos that can be used to create a 360° panorama at each of the waypoints in the original, uploaded mission. The CSV file must be exported from the Legacy Mission Hub.
The orientation of photos captured in row-major order at each waypoint will be computed based on:
- The camera field of view (FOV)
- The requested horizontal and vertical overlap percentage
After creating this new CSV file, import it as a new mission into Litchi's Mission Hub configured with the following settings:
- Heading Mode: Custom (WD)
- Path Mode: Straight Lines
- Gimbal Extension (+30°): On (Litchi app settings, for older drones only)
Panorama Configuration Details
About DJI Fly Compatibility
In Litchi, it is possible to assign up to 15 actions per waypoint. For example, in Litchi, one can define these actions at one waypoint:
- Rotate aircraft to 0 degrees
- Take photo
- Rotate aircraft to 45 degrees
- Take photo
- Rotate aircraft to 90 degrees
- Take photo
- Rotate aircraft to 135 degrees
- Take photo
- etc.
When converting such a mission into WPML, a series of actions, such as those displayed above, can be defined for a given waypoint and those actions can be configured to be executed sequentially. However, DJI Fly will only execute the first of a series of actions. DJI's implementation of waypoints in DJI Fly does not support multiple actions per waypoint despite the fact that the WPML language does support multiple actions executed sequentially.
When using the "Enable DJI Fly Compatibility" option, this utility will generate a mission in the shape of a small circle where one photo is captured at each waypoint with a given heading and gimbal pitch angle. Each waypoint is two feet (0.6 m) away from each other. This results in many more waypoints than are required for Litchi, but is the only way to capture the necessary photos with a panorama waypoint mission using DJI Fly.
Note that this option is incompatible with the "Add wait" and "Unlimited actions" options.
Wait after capturing a photo
In certain situations, camera actions run asynchronously. This means that if a "rotate drone" or "tilt camera" action occurs immediately after a "take photo" action, the image might be captured while the drone is still turning. If you notice motion blur in the photos, consider adding a "wait" action after each capture.
Unlimited actions
Historically, the number of actions that could be configured per waypoint was limited to 15. A recent change in Litchi software has removed that limit. For certain combinations of drones and software, unlimited actions may be configured at each waypoint. Enabling this option will remove the need for intermediate (dummy) waypoints. A dummy waypoint will still be used before each panorama. Unlimited camera actions may be configured for:
- Drones that use virtual sticks with the original Litchi app (Android version only)
- Drones that are supported by the new Litchi Pilot app
- Details
Maximum gimbal pitch
Most drones support a maximum gimbal pitch angle of 20 degrees. However, some newer drones allow for higher pitch angles. To accommodate this, an option is available to increase the maximum pitch angle beyond 20 degrees. Support for higher angles depends on the drone and the app you are using - Litchi, Litchi Pilot, or DJI Fly.